Welcome to my website! I am a student in the Robotics Masters program at University of Pennsylvania anticipating to graduate by Spring 2021. Below you can find information about my various academic projects
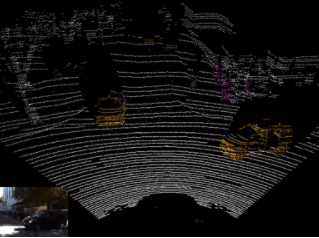
Deep Neural Network for segmentation of 3D LIDAR from vehicle driving scenes.
More
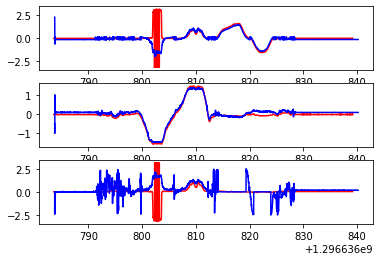
UKF implemented for estimating the roll, pitch and yaw based on IMU data
More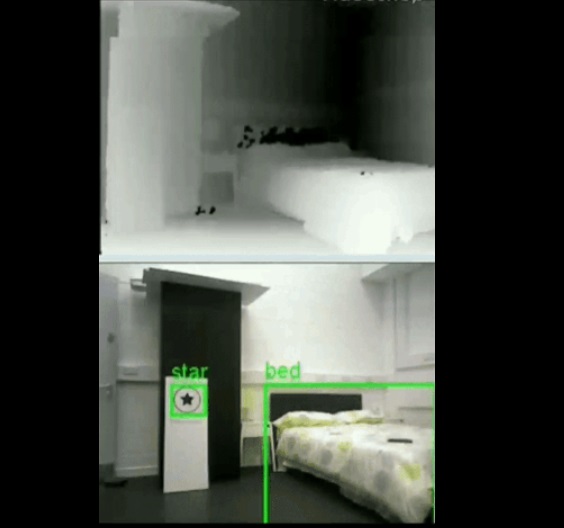
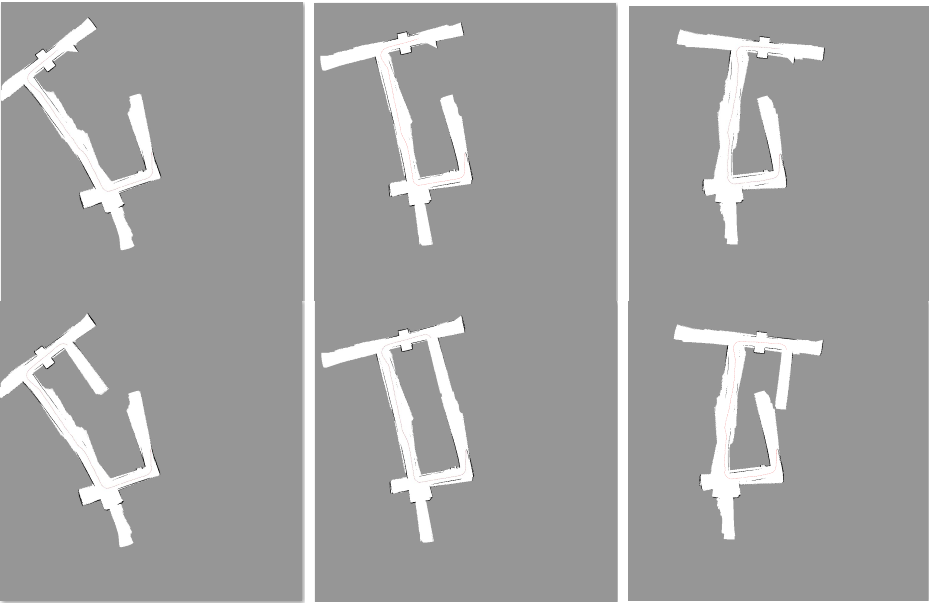
Indoor mobile robot navigation by triangulation with RGBD camera and obstacle avoidance with sonar sensors.
More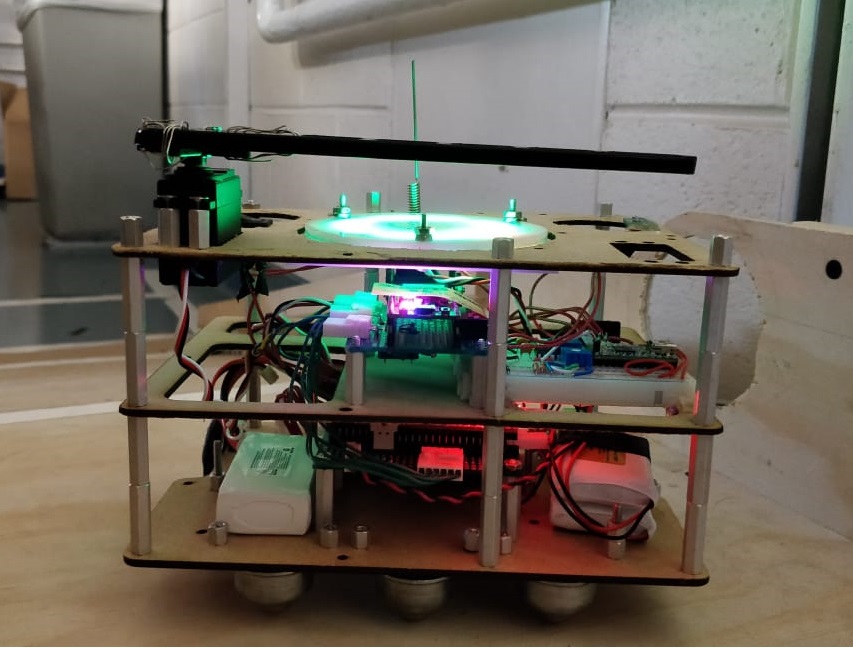
Remote controlled mobile robot capable of localisation using an IR beacon and autonomous navigation; programmed in embedded C
More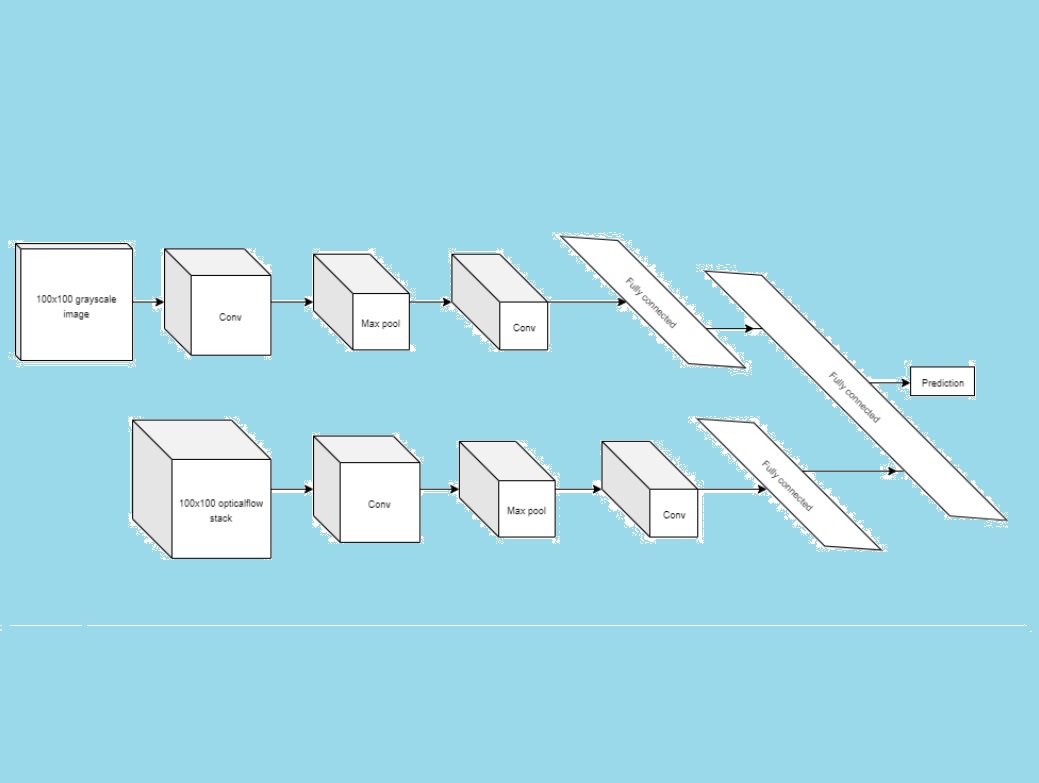
Developed video preprocessing pipeline and extracted optical flow data to train convolutional neural network to detect actions deemed to be violent from videos using PyTorch and OpenCV
More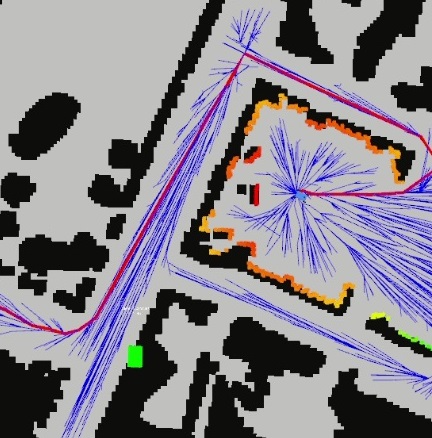
Implementation of a sampling based path planning algorithm using ROS and C++ with visualization in RViz
More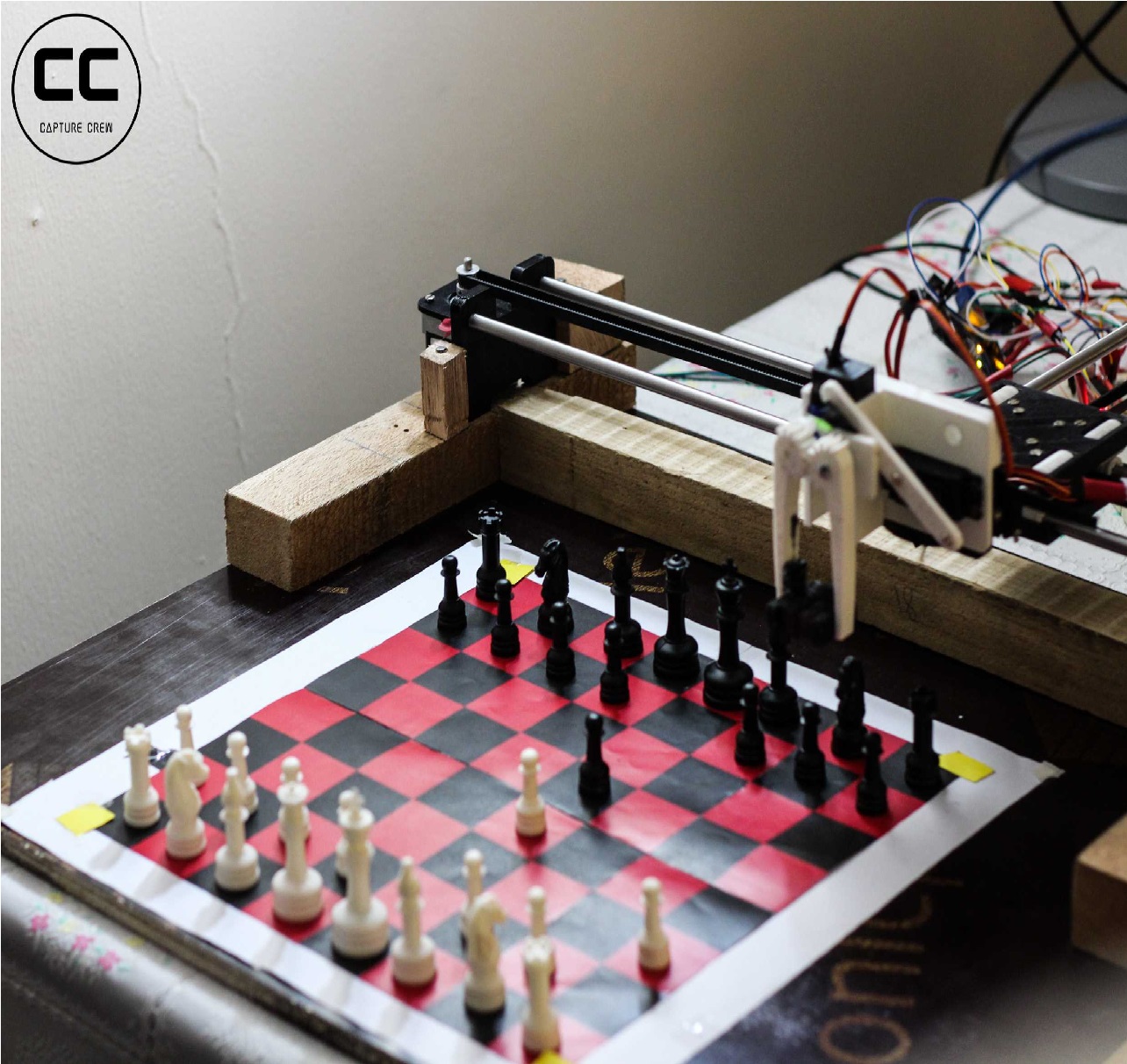
Developed computer vision algorithm in Python using OpenCV for tracking chess pieces and move identification and integrated microcontroller platform for electromechanical control of robot arm
More
Training a bipedal agent to walk by Neuroevolution. Project in Python, OpenAIGym
More
'When you start supporting a football club, you dont support it because of the trophies or a player or history, you support it because you found yourself somewhere there; found a place where you belong'
- Dennis Berkamp
Its simple, I like football and I love Arsenal... COME ON YOU GUNNERS!
'Travel makes one modest. You see what a tiny place you occupy in the world'
- Gustav Flaubert
Ive travelled to quite a few countries but my favourites so far would be Nepal and Turkey.
'I've wasted my life gaming; but good thing I have two more'
- unknown
Currently playing a lot of Call of Duty Warzone. Bravo 6 going dark...
'A reader lives a thousand lives before he dies . . . a man who never reads lives only one'
- George R.R. Martin
My ideal genres would be science fiction & suspense thrillers and my favourate author is Dan Brown.